Sample Code of VMS stabilization in 2D Advection-Diffusion
written by M. Anguiano, L. Zhu and A. Masud (2019).
Reference: Masud, A., & Khurram, R. A. (2004). A multiscale/stabilized finite element method for the advection–diffusion equation. Computer Methods in Applied Mechanics and Engineering, 193(21–22), 1997–2018. https://doi.org/10.1016/j.cma.2003.12.047
Contents
Mesh generation
Mesh generation:  uniform Q4 element
uniform Q4 element
nel_1D = 40; % Number of elements (1D) nnode_1D = nel_1D + 1; % Number of nodes (1D) x = linspace(0, nel_1D, nnode_1D); % x_streched = 0.5 * (1.0 - cos(pi * x / nel_1D)); % 1D stretched x_streched = x / nel_1D; [Xcoord, Ycoord] = meshgrid(x_streched, x_streched); % Generate spatial grid nnode = nnode_1D ^ 2; % Number of nodes (2D) node_num = linspace(1, nnode, nnode); % Node numbering node_num_mtx = reshape(node_num, [nnode_1D, nnode_1D]);
Gaussian Quadrature Rules

wght_1D = [5/9, 8/9, 5/9]; gp_loc_1D = [-sqrt(3/5), 0, sqrt(3/5)]; gp_2D = zeros(9, 3); k = 0; for i = 1:3 for j = 1:3 k = k + 1; gp_2D(k, :) = [gp_loc_1D(i), gp_loc_1D(j), wght_1D(i)*wght_1D(j)]; end end
Residual of the Variational Formulation
Advection-Diffusion Equation

u1 = zeros(nnode, 1); u2 = zeros(nnode, 1); p = zeros(nnode, 1); R_global = zeros(nnode, 1); K_global = zeros(nnode, nnode); xl = zeros(2, 4); for j = 1:nel_1D for i = 1:nel_1D xl(1,:) = [x_streched(i), x_streched(i+1), x_streched(i+1), x_streched(i)]; xl(2,:) = [x_streched(j), x_streched(j), x_streched(j+1), x_streched(j+1)]; node_el = [node_num_mtx(i,j), node_num_mtx(i+1,j), node_num_mtx(i+1,j+1), node_num_mtx(i,j+1)]; % ==================== % % VMS stab. parameter tauHat tauHat = computeTauHat(xl,gp_2D); % ==================== % r_local = zeros(4, 1); k_local = zeros(4, 4); for l = 1 : 9 % shape function and its derivatives at Gaussian point l [shg, jcb] = shp_bbl_Q4_adv(xl, gp_2D(l,1:2)); % location of Gaussian point in physical coordinates x_GP = shg(3,1:4) * xl(1,:)'; y_GP = shg(3,1:4) * xl(2,:)'; %velocity vector amag = 1e6; thta = 67.5; avel(1) = amag*cosd(thta); avel(2) = amag*sind(thta); % Forcing function f_gp = 8 * pi^2 * sin(2*pi*x_GP) * sin(2*pi*y_GP); %Diffusion Test case f_gp = 0; %Advection-diffusion test cases % residual (forcing) at the Gaussian point r_gp = shg(3,1:4)' * f_gp; % stiffness matrix at the Gaussian point k_gp = shg(1,1:4)' * shg(1,1:4) + shg(2,1:4)' * shg(2,1:4) ... + shg(3,1:4)' * (avel * shg((1:2), 1:4)); % ======================== % % VMS staibilization terms tau = shg(3,6)*tauHat; % tau = 0; % uncomment this line to revert back to Galerkin FEM, rstab_gp = tau * ((avel * shg(1:2, 1:4))' * f_gp ); kstab_gp = tau * ((avel * shg(1:2, 1:4))' * (avel * shg((1:2), 1:4))); r_gp = r_gp + rstab_gp; k_gp = k_gp + kstab_gp; % ======================== % % consistent tangent* at the Gaussian point r_local = r_local + r_gp * jcb * gp_2D(l,3); k_local = k_local + k_gp * jcb * gp_2D(l,3); end R_global(node_el, 1) = R_global(node_el, 1) + r_local; K_global(node_el, node_el) = K_global(node_el, node_el) + k_local; end end
Boundary Conditions
u_global = zeros(nnode, 1); node_boun = []; node_inte = []; for j = 1:nnode_1D for i = 1:nnode_1D if i == 1 || j == 1 % || j == nnode_1D || i == nnode_1D node_boun = [node_boun, node_num_mtx(i,j)]; % Non-zero dirichlet BC's if i == 1 || (i <= 0.2*nnode_1D && j == 1) u_global(node_num_mtx(i,j)) = 1; end else node_inte = [node_inte, node_num_mtx(i,j)]; end end end
Static Condensation
%u_global = zeros(nnode, 1);
u_global(node_inte) = K_global(node_inte, node_inte) \ (R_global(node_inte) - K_global(node_inte, node_boun) * u_global(node_boun));
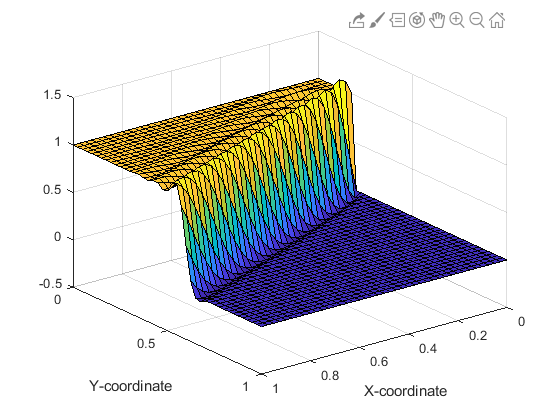
Visualization of the solution
surf(Xcoord , Ycoord , reshape(u_global, [nnode_1D, nnode_1D])); zlim([-0.5, 1.5]); xlabel('X-coordinate'); ylabel('Y-coordinate'); % Change viewing angle [az,el] = view; view(az+180,el);
Shape functions and bubble function and their derivatives for Q4 elements
Standard Q4 element
Quadratic bubble:  Advection bubble:
Advection bubble: 
(cont'd): 
Here 
% input : xl(2,4) nodal coordinates of the element % input : gp(2) location of Gaussion points % input : xb(2) location of internal virtual node % output: shg(3,5) shape and bubble functions and their derivatives % output: jcb jacobian function [shg, jcb] = shp_bbl_Q4_adv(xl, gp) shg = zeros(3, 5); x_el = xl(1,2) - xl(1,1); % x2 - x1 y_el = xl(2,4) - xl(2,1); % y4 - y1 jcb = x_el * y_el / 4; % affine elements only xi = gp(1); eta = gp(2); % shape functions shg(3,1) = 0.25 * (1 - xi) * (1 - eta); shg(3,2) = 0.25 * (1 + xi) * (1 - eta); shg(3,3) = 0.25 * (1 + xi) * (1 + eta); shg(3,4) = 0.25 * (1 - xi) * (1 + eta); % quadratic bubble shg(3,5) = (1 - xi^2) * (1 - eta^2); % advection bubble shg(3,6) = shg(3,1); %for X_b = -0.99, Adv. bubble is approxed by N1 % x derivative shg(1,1) = 0.25 * (-1 + eta); shg(1,2) = 0.25 * ( 1 - eta); shg(1,3) = 0.25 * ( 1 + eta); shg(1,4) = 0.25 * (-1 - eta); shg(1,5) = -2 * xi * (1 - eta^2); shg(1,6) = shg(1,1); % y derivative shg(2,1) = 0.25 * (-1 + xi); shg(2,2) = 0.25 * (-1 - xi); shg(2,3) = 0.25 * ( 1 + xi); shg(2,4) = 0.25 * ( 1 - xi); shg(2,5) = -2 * eta * (1 - xi^2); shg(2,6) = shg(2,1); % physical derivative shg(1,:) = shg(1,:) * 2 / x_el; shg(2,:) = shg(2,:) * 2 / y_el; end
Stabilization Parameter
Standard Q4 element
This subroutine computes the stabilization parameter tau. This computation involves integration over the element domain, performed here via Gauss Quadrature of the same order as for the element subroutine.
% input : xl(2,4) nodal coordinates of the element % input : gp_2D Gaussion points and weights % output: tauHat part of tau that is constant within the element function [tauHat] = computeTauHat(xl, gp_2D) b2_int = 0; denom1_int = 0; denom2_int = 0; for l = 1 : 9 % shape function and its derivatives at Gaussian point l [shg, jcb] = shp_bbl_Q4_adv(xl, gp_2D(l,1:2)); % location of Gaussian point in physical coordinates x_GP = shg(3,1:4) * xl(1,:)'; y_GP = shg(3,1:4) * xl(2,:)'; % velocity vector amag = 1e6; thta = 67.5; avel(1) = amag*cosd(thta); avel(2) = amag*sind(thta); % Point Evalutions b2_gp = shg(3,6); denom1_gp = shg(1,6)' * shg(1,5) + shg(2,6)' * shg(2,5); denom2_gp = shg(3,6)' * (avel * shg(1:2,5)); % Numerical Quadrature b2_int = b2_int + b2_gp * jcb * gp_2D(l,3); denom1_int = denom1_int + denom1_gp * jcb * gp_2D(l,3); denom2_int = denom2_int + denom2_gp * jcb * gp_2D(l,3); end tauHat = b2_int / (denom1_int + denom2_int); end